CamPoint: Boosting Point Cloud Segmentation with Virtual Camera
 Fediverse
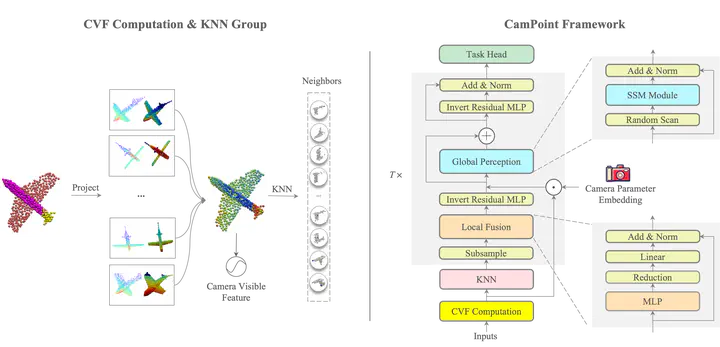
FediverseAbstract: Local features aggregation and global information perception are the fundamental to point cloud segmentation. However, existing works often fall short in effectively identifying semantic relevant neighbors and face challenges in endowing each point with high-level information. Here, we propose CamPoint, an innovative method that employs virtual cameras to solve the above problems. The core of CamPoint lies in introducing the novel camera visibility feature for points, where each dimension encodes the visibility of that point from a specific camera. Leveraging this feature, we propose the camera perspective slice distance for accurate relevant neighbor searching and design the camera parameter embedding to deliver rich feature representations for global interaction. Specifically, the camera perspective slice distance between two points is defined as a similarity metric derived from their camera visibility features, whereby an increased number of shared cameras observing both points corresponds to a reduced distance between them. To effectively facilitate global semantic perception, we assign each camera an optimizable embedding and then integrate these embeddings into the original spatial features based on visibility attributes, thereby obtaining high-level features enriched with camera priors. Additionally, the state space model characterized by linear computational complexity is employed as the operator to achieve global learning with efficiency. Comprehensive experiments on multiple datasets show that our CamPoint surpasses the current state-of-the-art in multiple datasets, achieving low training cost and fast inference speed. The code will be released upon acceptance.